Roomba Serii 5xx - Latarnie i Wirtualne Ściany - Informacje
Ten post wyjaśnia jak Roomba serii 500 działa z Latarniami i Wirtualnymi Ścianami.
1. Parowanie Latarni z Robotem
2. Różnice między Latarnią a Wirtualna ścianą
3. Ruch przez Latarnie
4. Dokowanie / zachowanie robota kiedy są używane latarnie
5. Różnice między Wirtualną Ścianą Latarnia i Wirtualną ścianą
6. Rozmieszczenie i wykorzystanie wskazówek dla latarni i wirtualnych ścian.
1. Parowanie Latarni z Robotem
Kiedy wymienisz baterie w Latarni traci ona swoja pamięć czyli z którym robotem została sparowana.
Także gdy zresetujesz robota lub wyjmiesz jego baterię robot traci pamięć z którymi latarniami został sparowany.
Kiedy Latarnia nie jest sparowana wyczuwa sygnał każdej Roomby, Latarnia budzi się i czeka na jej odkrycie.
Kiedy robot zaczyna czyszczenie wysyła wiadomość do wszystkich poprzednio sparowanych latarni i tych nie sparowanych oraz czeka na odpowiedz latarni, trzyma zapis ile z nich odpowiedziało. Dzieki temu wie ilu powinien oczekiwać podczas sprzątania. W trakcie sprzątania także sprawdza latarnie.
Kiedy robot napotka latarnie dzięki czujnikom podczerwieni (IR), robot odpyta latarnie przez fale radiowe (RF)
i poczeka na odpowiedź od latarni przez podczerwień(IR) ( jeśli zauważysz ze robot się zatrzymał przy latarni to znaczy że czeka na jej odpowiedź). Kiedy robot nawiąże połączenie z dana latarnią numeruje ją i tak robot buduje sobie „przewodnik” w którym pokoju się znajduje i ile jest pokoi do posprzątania oraz ile jest latarni do przejścia aby dojść powrotem do stacji dokującej. Robot powtarza procedurę dla każdej napotkanej latarni (nawet jeśli latarnia jest w ustawieniu Wirtualnej ściany). Gdy robot nawiąże takie połączenie z latarnią/latarniami zostaje z nimi „sparowany” i latarnie nie będą włączane z innym robotem dopóki nie wyjmie się baterii z latarni.
Numerowanie pokoi zaczyna się od nowa za każdym nowym sprzątaniem. Więc kiedy potrzebujesz zmienić położenie latarni na nową lokalizację i zrobisz to gdy robot jest wyłączony, robot dostosuje się do tej zmiany automatycznie. ( Zauważ że jeśli zmienisz położenia latarni podczas sprzątania robot nie dostosuje się do zmian i może utknąć w pokoju lub nie będzie w stanie znaleźć stacji dokującej.)
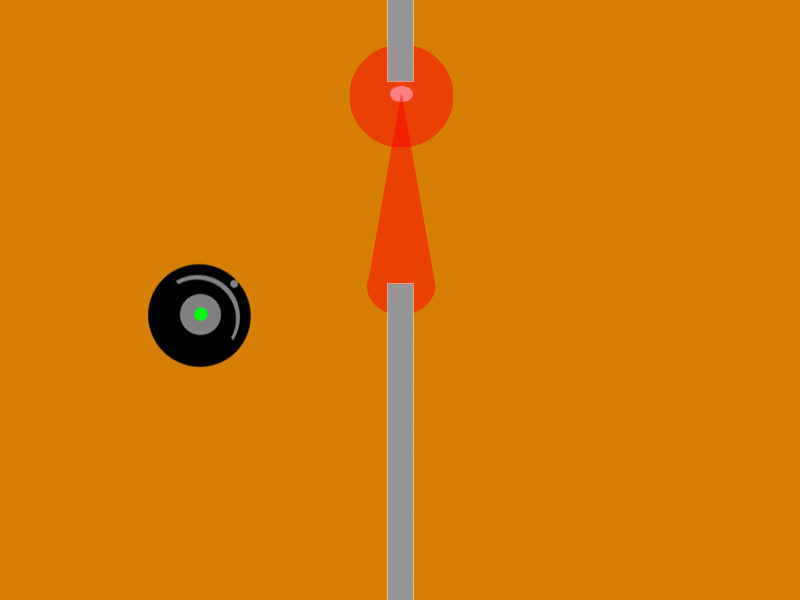
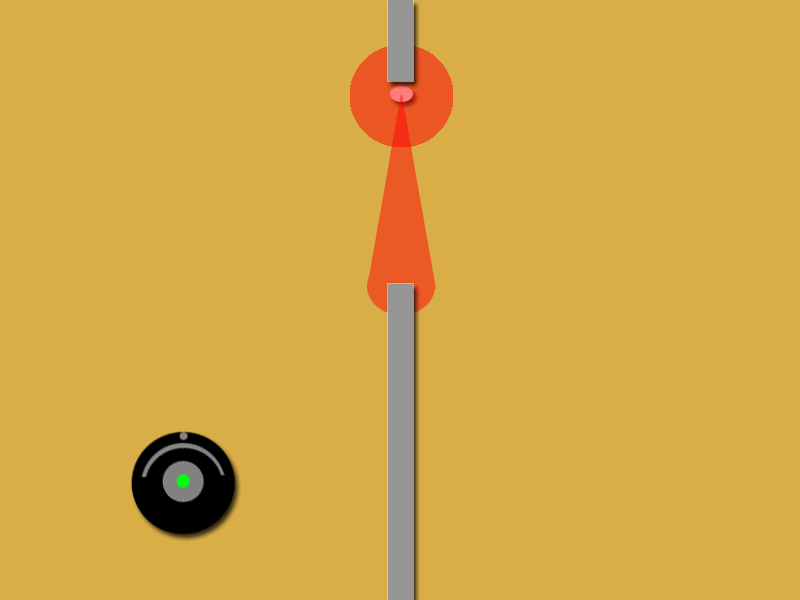
Obrazek poniżej pokazuje, co się dzieje podczas procesu parowania latarni. Fioletowe/liliowe koła reprezentują komunikacje RF między robotem a latarniami a czerwona strefa reprezentuje strefę halo i promień płotu, które są podczerwienią.
2. Różnice między Latarnią a Wirtualna ścianą
W trybie Latarni, latarnie zachowują się jak wirtualne drzwi, które otwierają się jak robot zapyta o to.
Przez większość czasu Latarnie mają włączona strefę halo i promień płotu, który uniemożliwia robotowi przejście przez Latarnię. Gdy robot skończy sprzątanie pokoju, „pyta latarnię o otwarcie drzwi” i robot przejeżdża przez latarnię. Ruch jest szczegółowo opisany poniżej.
W trybie wirtualnej ściany, latarnie włączają się automatycznie, ale robot nigdy nie przejdzie przez promień płotu ( niewidzialna bariera).
3. Ruch przez Latarnie
Gdy robot zdecyduje że już czas na ruch z jednego pokoju do drugiego, to dokonuje aktu, który nazywamy ruchem, co oznacza po prostu, że robot korzysta z latarni, aby przejść z jednego pomieszczenia do drugiego.
Istnieje 5 kroków w procesie ruchu:
1. Robot decyduje, że skończył czyszczenie danego pokoju.
2. Robot pyta latarni, aby włączyły podczerwień (IR) "promień prowadzący" (pokazano na poniżej zielony i niebieski) z wykorzystaniem częstotliwości radiowej (RF), komunikacji (reprezentowane przez fioletowe kręgi poniżej).
3. Robot kontynuuje czyszczenie, aż znajdzie promień i potem podąża za promieniem do latarni aż do strefy halo (zaznaczone na czerwono poniżej).
4. Robot podąża strefą halo latarni, aż dotrze do promienia (niebieski poniżej), z drugiej strony promienia ogrodzenia (zaznaczone na czerwono poniżej), w drugim pokoju.
5. Robot wykorzystuje RF by powiedzieć latarni, aby wyłączyła promień naprowadzania w celu oszczędzania baterii w latarniach.
Proces ten jest powtarzany dla każdej latarni, którą robot znajdzie w trakcie swojej misji. Kiedy robot zakończy swoją misję będzie powtarzał procedurę w odwrotnym kierunku lub przechodził w kierunku przeciwnym,
każdą z latarni przy użyciu tej samej metody opisanej powyżej.
Proszę zobaczyć "Ustawienie i wykorzystanie porad dla latarni i ścian wirtualnych" na dole tego postu.
4. Dokowanie / zachowanie robota kiedy są używane latarnie
Gdy używamy latarni robot ignoruje sygnał ze stacji dokującej dopóki robot nie „pomyśli” że jest w pokoju ze stacją dokującą. Robot decyduje w którym pokoju jest bazując na ilości miniętych latarni.
To najlepiej wyjaśnia przykład:
Pokój 1 gdzie jest stacja dokująca
Pokój 2 jest pomiędzy Latarnią nr 1 a Latarnią nr 2
Pokój 3 jest za Latarnią nr 2
Jeśli robot minie latarnie nr 1 I jest w pokoju 2 I ręcznie przeniesiesz robota powrotem do pokoju 1 w celu czyszczenia i postawisz naprzeciw stacji dokującej robot pomyśli że jest ciągle w pokoju 2 i zignoruje stacje dokującą ponieważ myśli że musi znaleźć latarnie nr 1 i przejść ja by dostać się do stacji dokującej.
Tak samo jeśli robot jest w pokoju 3. Robot myśli że musi minąć 2 latarnie zanim będzie mógł się zadokować na stacji.
Kiedy robot zostanie zabrany z pokoju 2 lub pokoju 3, musisz ręczenie przenieść robota do pokoju z którego go uprzednio zabrałeś jeśli chcesz by mógł się zadokować na stacji.
Jeśli nie chcesz nieść robota spowrotem do pokoju z którego go uprzednio zabrałeś musisz później przenieść
Robota na stację ręcznie wtedy robot myśli ze misja jest skończona i zaczyna się ładowanie.
Gdy robot zacznie nowe sprzątanie licznik pokoi jest zerowany i robot pracuje od nowa licząc latarnie i pokoje.
Generalnie jeśli przeniesiesz robota ręcznie z pokoju do pokoju robot nie będzie wiedzial jak wrócić do bazy i w którym pokoju się znajduje.
It is not immediately intuitive to most people why the robot would ignore its dock when it can see it, but here is one case that highlights a problem, which this behavior is designed to solve:
Przyjmijmy że robot jest w stanie zobaczyć stacje dokującą ( promienie stacji ), ale jest wirtualna sciana lub przeszkoda między robotem a stacja dokującą. Jeśli robot próbuje podążać za promieniem stacji jedzie aż do momentu napotkania przeszkody i wtedy przerywa i próbuje od nowa, myśląc że znalazł bazę. Robot może utknąć lub znacznie opóźnić się w podążaniu za promieniem bazy, może tylko dojecha częśc dorgi i napotkać przeszkodę nie do pokonania.
Z drugiej strony , jeśli robot ignoruje sygnały z bazy, dopóki wie że jest w pokoju w którym baza była poprzednio, pomyślnie łapiąc wiązkę promienia bazy może wykonać udane dokowanie.
Ciągle staramy się doskonalić nasze roboty i ich inteligencję, elastyczne i wytrzymałe, aby mogły działać w różnych środowiskach, całkowicie losowych i różnych konfiguracjach pokoi i akcesoriów. Takie zachowanie jest jednym z zaprojektowanych, które jest przeznaczony do dokowania wiarygodnie, w tak wielu środowiskach jak to możliwe.
5. Różnice między Wirtualną Ścianą Latarnia i Wirtualną ścianą
Seria 500 Wirtualny Mur (z punktu widzenia użytkownika) tak samo jak wirtualne ściany dostarczonej z serii 4xxx roboty i Scooba. Musisz je włączyć ręcznie, i wyłączają się automatycznie. FYI Różnica między 5xx VW i 4xxx serii VW są pewne skomplikowane rzeczy związane ze sposobem jakim VW komunikuje się z robotem za pomocą podczerwieni (IR).
Wirtualne Ściany Latarnie są (z punktu widzenia użytkownika) inne od VW. Robot komunikuje się z Latarnią (LH) przy pomocy fal radiowych (RF) i podczerwieni (IR) i robot włącza LH automatycznie, gdy zaczyna misję. Warto zauważyć, że korzystając z latarni, może spowodować, że robota robi różne rzeczy w odpowiedzi na latarnie, na podstawie tego, czy latarnia jest w trybie "wirtualnej ściany" lub "trybie latarni".
W trybie latarnia, latarnia działa jak wirtualne drzwi, które otwiera się, gdy robot pyta go. W trybie wirtualnej ściany latarnia włącza się automatycznie, ale robot nie przetnie wiązki ogrodzenia (niewidzialnej bariery).
6. Rozmieszczenie i wykorzystanie wskazówek dla latarni i wirtualnych ścian.
Tryb Wirtualna Ścina:
Miejsca w korytarzach gdzie roomba ma nie przechodzić.
Ustaw tyłem do ściany lub framugi drzwi by promień blokował przejście.
Tryb Latarni:
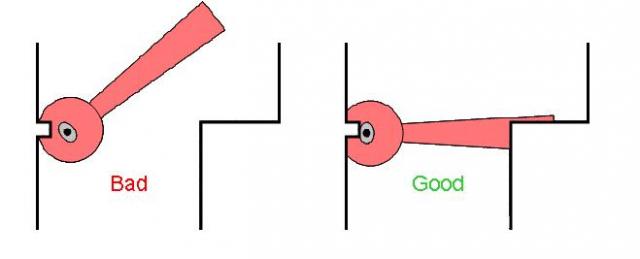
Ustaw tyłem do ściany lub framugi drzwi by promień blokował przejście.
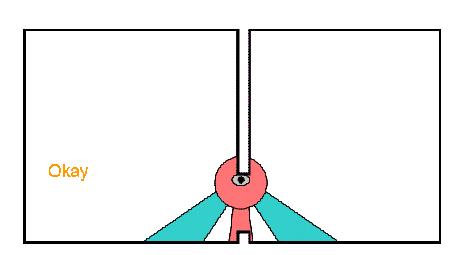
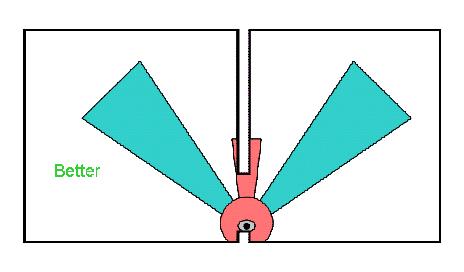
Upewnij się, że nie ma żadnych przeszkód w promieniu 1 metra (3 stóp) od przodu latarni.
Upewnij się, że nie ma żadnych przeszkód z boków latarni. Robot musi być w stanie znaleźć i podążać za promieniem oraz muc znaleźć strefę halo i nią podążać.
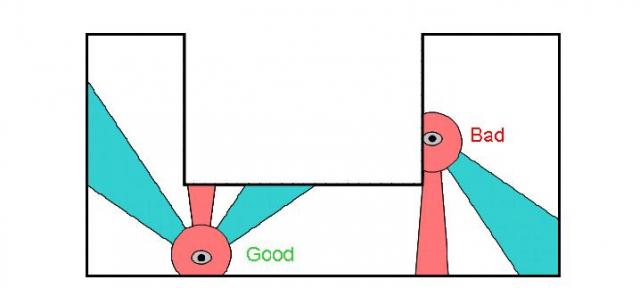
Jeśli to możliwe, umieść latarnie tak, aby promień naprowadzający kierował się w pustą przestrzeń pokoju.